
Trabalho
de Sistemas Digitais
ALUNOS: DRE:
Bruno Hermes da Fonseca da Costa Leite
|
098103101
|
Ester José Casado de Lima
|
099263085
|
|
Fabrício Lopes Leão |
099104621 |
|
Rodrigo Franceski Prestes |
099103798 |
PROFESSOR: Otto
Estudo do Motor de Passo
e seu controle digital
1.
INTRODUÇÃO
E OBJETIVOS:
O objetivo deste trabalho e explicar as
características e o funcionamento do chamado MOTOR DE PASSO, um tipo de motor elétrico que pode ser controlado
por sinais digitais, tornando-o preciso e de recomendável utilização em
aplicações que venham a requerer um ajuste fino de posicionamento.
Iniciamos com um estudo rápido e pouco profundo dos
motores elétricos em geral. Depois apresentamos o MOTOR DE PASSO, damos alguns
detalhes de seu funcionamento e falamos sobre como controlá-lo.
Finalmente apresentamos algumas aplicações do motor
em estudo, frisando sempre que o preciso controle sobre seus movimentos é o que
mais o diferencia dos demais motores elétricos.
2.
MOTORES ELÉTRICOS:
Um motor elétrico é
um dispositivo que transforma energia elétrica em energia mecânica, em geral
energia cinética. Ou seja, num motor, a simples presença da corrente elétrica,
seja cc ou ac, nos garante movimento em um eixo, que pode ser aproveitado de
diversas maneiras dependendo da aplicação do motor.
O acionamento de
máquinas e equipamentos mecânicos por motores elétricos é um assunto de grande
importância econômica. Estima-se que o mercado mundial de motores elétricos de
todos os tipos seja da ordem de uma dezena de bilhões de dólares por ano.
No campo dos
acionamentos industriais, avalia-se que de 70 a 80% da energia elétrica
consumida pelo conjunto de todas as indústrias seja transformada em energia
mecânica através de motores elétricos. Isto significa que, admitindo-se um
rendimento médio da ordem de 80% do universo de motores em aplicações
industriais, cerca de 15% da energia elétrica industrial transforma-se em
perdas nos motores.
No Brasil, a
fabricação de motores elétricos é um segmento relevante da atividade econômica.
No início da década de 80 a indústria brasileira de motores produziu em torno
de três milhões de unidades por ano, tendo mais do que 80 mil unidades acima de
20cv.
Entre o fabricante e
o usuário final deve existir uma estreita comunicação, de forma que seja feita
uma correta seleção do motor a ser utilizado em determinada aplicação.
Fundamentalmente o processo de seleção de um acionamento elétrico, corresponde
à escolha de um motor que possa atender a, pelo menos, três requisitos do
utilizador:
·
Fonte de alimentação: tipo, tensão,
freqüência, simetria, equilíbrio, etc.
·
Condições ambientais: agressividade,
periculosidade, altitude, temperatura, etc.
·
Exigências da carga
e condições de serviço: potência solicitada, rotação, esforços mecânicos,
configuração física, ciclos de operação, confiabilidade, etc.
A divisão em motores
de corrente contínua e de corrente alternada é devida, obviamente, ao tipo de
tensão de alimentação.
Apresentamos abaixo
algumas características básicas dos motores AC e DC:
Motores DC: São conhecidos por seu controle preciso de velocidade e por seu ajuste fino e são, portanto, largamente utilizados em aplicações
que exigem tais características. Vale comentar que a utilização dos motores de
corrente contínua teve um grande incremento nos últimos anos, graças à
eletrônica de potência. Fontes estáticas de corrente contínua com tiristores
confiáveis, de baixo custo e manutenção simples, substituíram os grupos
conversores rotativos. Com isso, motores de corrente contínua passaram a
constituir alternativa mais atrativa em uma série de aplicações.
Motores AC: A grande maioria das
aplicações tem sua configuração mais econômica com a utilização de motores de indução de gaiola. Estima-se que 90%
(em unidades) dos motores fabricados sejam deste tipo. Quando não há
necessidade de ajuste e controle de velocidade e a potência é inferior a cerca
de 500cv, sua utilização é amplamente dominante. Pode-se dizer que outros tipos
de motores são utilizados somente quando alguma peculiaridade determina tal
opção.
OBS: Paradoxalmente ao
que foi comentado no final da análise dos motores DC, o constante
desenvolvimento da eletrônica de potência deverá levar a um progressivo
abandono dos motores de corrente contínua. Isto porque fontes de tensão e
freqüência controladas, alimentando motores de corrente alternada,
principalmente os de indução de
gaiola,
já estão se transformando em opções mais atraentes, quanto ao ajuste e ao
controle de velocidade.
3.
MOTOR DC
Apresentaremos
apenas um resumo do funcionamento do motor DC, já que este não é o objeto
principal do nosso estudo. Achamos relevante falar deste motor, pois com ele
introduziremos os conceitos de controle e feedback, que servirão de introdução
aos motores de passo.
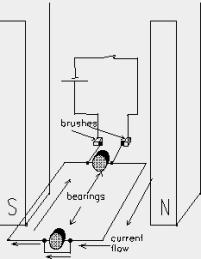
O funcionamento
básico do motor DC está fundamentado na Força de Lorentz aplicada em uma carga em movimento
dentro de um campo magnético (F = qvB). Consideremos uma espira de corrente
inserida num campo magnético criado por um ímã permanente, em que há uma
corrente criada por uma bateria (fonte DC). De uma forma simplificada, a
simples passagem desta corrente faz com que apareçam duas forças de sentidos
contrários, aplicadas uma em cada lado da espira. Estas forças criam um torque
que, obviamente, faz a espira girar, transformando a energia elétrica da
corrente em energia cinética num eixo acoplado às espiras. A direção da rotação
depende da polaridade da bateria e da direção das linhas de campo magnético
criadas pelo ímã.
Um motor real é
composto de conjuntos múltiplos de espiras, dispostas de tal forma que as
forças que agem em cada espira sejam somadas e produzam um torque significativo
para uma possível aplicação.
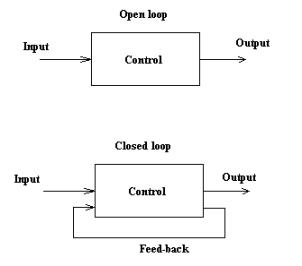
Os motores DC são
utilizados, por exemplo, em aplicações como o posicionamento de um braço de
robô. Mas eles apresentam uma grande
desvantagem. Para que um computador dê um comando para que o braço se mova para uma
determinada posição com precisão, é necessário um complicado circuito externo
provido de sensores de posição, que informe ao computador que o braço já está
na posição determinada (feedback).
O esquema abaixo
mostra uma situação sem e outra com feedback:
É justamente para
que se resolva este problema que foi desenvolvido o chamado MOTOR DE PASSO,
descrito no item a seguir.
4.
MOTOR DE PASSO
O motor de passo é um transdutor que converte energia elétrica em
movimento controlado através de pulsos, o que possibilita o deslocamento por
passo, onde passo é o menor deslocamento angular.
Com o passar dos anos houve um aumento na
popularidade deste motor, principalmente pelo seu tamanho e custo reduzidos e
também a total adaptação por controle digitais.
Outra vantagem do motor de passos em relação aos outros motores é
a estabilidade. Quando quisermos obter uma rotação específica de um certo grau,
calcularemos o número de rotação por pulsos o que nos possibilita uma boa
precisão no movimento.
Os antigos motores passavam do ponto e, para voltar, precisavam da
realimentação negativa. Por não girar por passos a inércia destes é maior e
assim são mais instáveis.
4.A. Definições para Motores a Passo
Antes
de explicarmos os tipos de motores e o funcionamento em si, definiremos algumas
outras expressões a fim de tornar o texto mais claro.
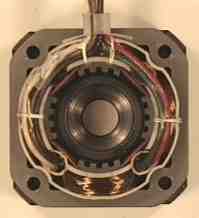
Rotor =
É denominado rotor o conjunto eixo-imã que rodam solidariamente na parte móvel
do motor.
Estator = Define-se como estator a trave fixa onde as bobinas
são enroladas. Abaixo segue uma figura onde podemos ver as partes mencionadas
(o rotor à esquerda e o estator a direita).

4.B. Parâmetros Importantes
Graus por Passo = sem
dúvida a característica mais importante ao se escolher o motor, o número de
graus por passo está intimamente vinculado com o número de passos por volta. Os
valores mais comuns para esta característica, também referida como resolution,
são 0.72,1.8, 3.6, 7.5, 15 e até 90 graus.
Momento de Frenagem = momento máximo com o rotor
bloqueado, sem perda de passos.
Momento (Torque) = efeito rotativo de uma força , medindo a partir do produto
da mesma pela distância perpendicular até o ponto em que ela atua partindo de
sua linha de ação.
Taxa de Andamento = regime de operação atingido após uma aceleração suave.
Momento de Inércia = medida da resistência mecânica
oferecida por um corpo à aceleração angular.
Auto-Indutância = determina a magnitude da corrente média em regimes pesados
de operação, de acordo com o tipo de enrolamento do estator: relaciona o fluxo
magnético com as correntes que o produzem.
Resistências Ôhmicas = determina a magnitude da corrente do estator com o rotor
parado.
Corrente máxima do estator = determinada
pela bitola do fio empregado nos enrolamentos.
"Holding Torque" = é
mínima potência para fazer o motor mudar de posição parada.
Torque Residual = é a resultante de todos os fluxos magnético presente nos
pólos do estator.
Resposta de Passo = é tempo que o motor gasta para executar o comando.
Ressonância = como todo material, o motor de passos tem sua freqüência
natural. Quando o motor gira com uma freqüência igual a sua, ele começa a
oscilar e a perder passos.
Tensão de trabalho =
normalmente impresso na própia chassi do motor, a tensão em que trabalha o
motor é fundamental na obtenção do torque do componente. Tensões acima do
estipulado pelo fabricante em seu datasheet costumam aumentar o torque do
motor, porém, tal procedimento resulta na diminuição da vida útil do mesmo.
Destaca-se que a tensão de trabalho do motor não necessariamente deve ser a
tensão utilizada na lógica do circuito. Os valores normalmente encontrados
variam de +5V à +48V.
4.C.
Tipos de Motores de Passo
Relutância Variável = Apresenta um rotor com muitas
polaridades construídas a partir de ferro doce, apresenta também em estator
laminado. Por não possuir imã, quando energizado apresenta torque estático
nulo. Tendo assim baixa inércia de rotor não pode ser utilizado como carga
inercial grande.
Imã Permanente = Apresenta um rotor de material alnico
ou ferrite e é magnetizado radialmente devido a isto o torque estático não é
nulo.
Híbridos = É uma mistura dos dois anteriores e apresenta rotor e estator
multidentados . O rotor é de imã permanente e magnetizado axialmente. Apresenta
grande precisão (3%), boa relação torque/tamanho e ângulos pequenos (0,9 e 1,8
graus). Para que o rotor avance um passo é necessário que a polaridade
magnética de um dente do estator se alinha com a polaridade magnética oposta de
um dente do rotor.
5.
FUNCIONAMENTO BÁSICO DO MOTOR DE PASSO
Normalmente os motores de passo são projetados com
enrolamento de estator polifásico o que não foge muito dos demais motores. O
número de pólos é determinado pelo passo angular desejado por pulsos de
entrada. Os motores de passo têm alimentação externa. Conforme os pulsos na
entrada do circuito de alimentação, este oferece correntes aos enrolamentos
certos para fornecer o deslocamento desejado, como veremos em breve.
Falaremos agora então, mais um pouco sobre motores com imã permanente. Além do número de fases do motor, existe outra subdivisão entre estes componentes, a sua polaridade.
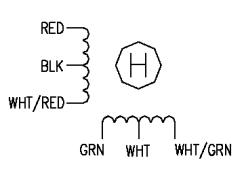
Motores
de passo unipolares são caracterizados por possuírem um center-tape entre o enrolamento de suas bobinas. Normalmente utiliza--se
este center-tape para alimentar o motor, que é controlado aterrando-se as
extremidades dos enrolamentos. Abaixo segue uma figura ilustrativa onde podemos
ver que tal motor possui duas bobinas e quatro fases.
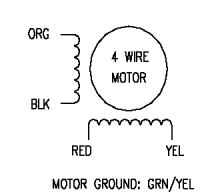
Diferentes
dos unipolares, os motores bipolares exigem circuitos mais complexos. A grande
vantagem em se usar os bipolares é prover maior torque, além de ter uma maior
proporção entre tamanho e torque. Fisicamente os motores têm enrolamentos
separados, sendo necessário uma polarização reversa durante a operação para o
passo acontecer. Em seguida vemos uma ilustração do motor bipolar.
Um
motor de corrente contínua, quando alimentado, gira no mesmo sentido e com
rotação constante, ou seja, para que estes motores funcionem, é necessário
apenas estabelecer sua alimentação. Com o auxilio de circuitos externos de
controle, estes motores de corrente contínua poderão inverter o sentido de
rotação ou variar sua velocidade.
Para
que um motor de passo funcione, é necessário que sua alimentação seja feita de
forma seqüencial e repetida. Não basta apenas ligar os fios do motor de passo a
uma fonte de energia e sim ligá-los a um circuito que execute a seqüência
requerida pelo motor.
Existem
três tipos básicos de movimentos o de passo inteiro e o de meio passo e o
micropasso, tanto para o motor bipolar como para o unipolar. O de micropasso
tem sua tecnologia não muito divulgada, e baseia-se no controle da corrente que
flui por cada bobina multiplicado pelo numero de passos por revolução.
Internamente,
os motores têm seus enrolamentos similares a figura.
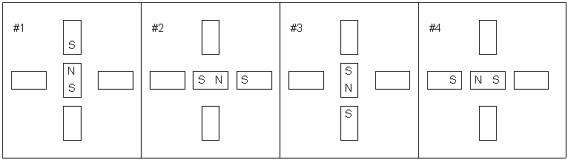
A
energização de uma e somente uma bobina de cada vez produz um pequeno
deslocamento no rotor. Este deslocamento ocorre simplesmente pelo fato de o
rotor ser magneticamente ativo e a energização das bobinas criar um campo
magnético intenso que atua no sentido de se alinhar com as pás do rotor.
Assim,
polarizando de forma adequada os bobinas, podemos movimentar o rotor somente
entre as bobinas (passo inteiro), ou entre as bobinas e alinhadas com as
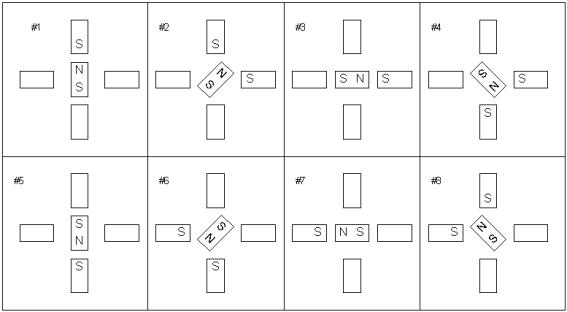
mesmas. Abaixo segue os movimentos executados.
Motor bipolar com passo inteiro
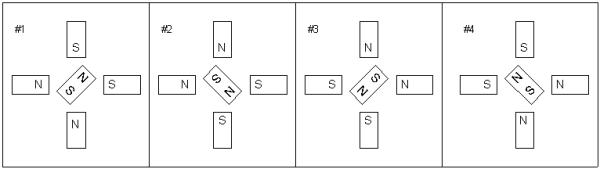
Motor bipolar com meio passo
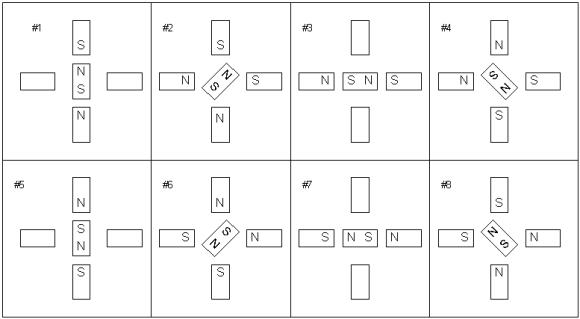
Motor unipolar com passo inteiro
Motor unipolar com meio passo
Abaixo
segue uma tabela com a seqüência que deve ser alimentada as bobinas do motor.
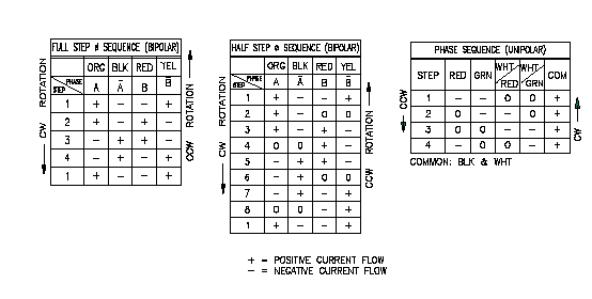
Para
que se obtenha uma rotação constante é necessário que a energização das bobinas
seja periódica. Esta periodicidade é proporcionada por circuitos eletrônicos
que controlam a velocidade e o sentido de rotação do motor.
A
pequeno ângulo deslocado pelo rotor depende do número de dentes do mesmo assim
como o número de fases do motor. Preferimos não explicar mais detalhadamente
este tópico minuciosamente, por ser de grande dificuldade de se explicar à
movimentação dos dentes do rotor pelo estator bidimensionalmente. Em geral, o
número de dentes do rotor multiplicado pelo número de fases revela o número de
passos por revolução.
Por
se tratar de sinais digitais, fica fácil compreender a versatilidade dos
motores de passo. São motores que apresentam uma gama de rotação muito ampla
que pode variar de zero até 7200 rpm; apresentam boa relação peso/potência;
permitem a inversão de rotação em pleno funcionamento; alguns motores possuem
precisão de 97%; possuem ótima frenagem do rotor e podem mover-se
passo-a-passo. Mover o motor passo-a-passo resume-se ao seguinte: se um
determinado motor de passo possuir 170 passos, isto significa que cada volta do
eixo do motor é dividida 170 vezes, ou seja, cada passo corresponde a 2,1 graus
e o rotor tem a capacidade para mover-se apenas estes 2,1 graus.
Didaticamente
falando, o sistema de controle se baseia em um circuito oscilador onde seria
gerado um sinal cuja freqüência estaria diretamente relacionado com a
velocidade de rotação do motor de passo. Esta freqüência seria facilmente
alterada (seja por atuação em componentes passivos seja por meio eletrônico)
dentro de um determinado valor assim, o motor apresentaria uma rotação mínima e
uma máxima. A função "Freio" se daria simplesmente pela inibição do
sinal gerado pelo oscilador.
O próximo passo seria providenciar um circuito amplificador de saída, pois algumas aplicações exigem uma demanda de corrente relativamente elevada. Caberia ao circuito amplificador de saída fornecer estas correntes de forma segura, econômica e rápida. O circuito amplificador de saída seria constituído de transistores e/ou dispositivos de potência que drenam corrente em torno de 500 mA ou mais. Motores de passo geralmente suportam correntes acima de 1,5 Ampère. O amplificador de saída é o dispositivo mais solicitado em um projeto de controle de motor de passo. Devido às variações de trabalho a que pode ser submetido o motor de passo, um amplificador mal projetado pode limitar muito o conjunto como um todo. Um exemplo destas limitações pode ser facilmente entendido. Um motor de passo girando a altas rotações, repentinamente é solicitado a inverter sua rotação (como ocorre em máquinas CNC e cabeçotes de impressão). No momento da inversão as correntes envolvidas são muito altas e o circuito amplificador deve suportar tais drenagens de corrente.
O torque do motor de passo depende da freqüência aplicada a
alimentação. Quanto maior a freqüência, menor o torque, porque o rotor tem
menos tempo para mover-se de um ângulo para outro.
A faixa de partida deste motor é aquela na qual a
posição da carga segue os pulsos sem perder passos, a faixa de giro é aquela na
qual a velocidade da carga também segue a freqüência dos pulsos, mas com uma
diferença: não pode partir, parar ou inverter, independente do comando.
6. APLICAÇÕES COM MOTOR DE PASSO
Como os motores de passos têm movimentos precisos, qualquer
equipamento que precise de precisão no movimento utilizaram estes motores.
Podemos citar pôr exemplo o controle de microcâmeras
num circuito interno de vigilância, em clínicas radiológicas no auxílio de
operadores para os mesmos orientarem o posicionamento das pessoas submetidas a
uma radiografia, posicionamento de uma mesa de trabalho em duas dimensões,
furação automática de acordo com instruções em fita sobre as posições dos
furos. A seguir veremos algumas aplicações mais detalhadamente.
Aplicação #1
A primeira aplicação relatada é de um scanner
óptico. O projetista do laser utilizado para o scanner tem que rotacionar
precisamente uma rede de difração com o controle do computador para ajustar a
freqüência do laser. A rede precisa ser posicionada com um erro máximo de
0.05º. A alta resolução do micromotor de passo e a ausência de movimentos não
previstos quando este pára o tornam ideal.
A solução encontrada: como a inércia da rede é
igual a 2% da inércia do motor ela pode ser ignorada. A situação exigia um
pequeno motor. Um micromotor de passo, que produzia um grande torque foi
selecionado. Através da interface utilizando o protocolo IEEE-4888 controlada
por um simples programa escrito em BASIC, o micromotor funcionou de forma
satisfatória. Abaixo segue uma figura ilustrativa do problema.
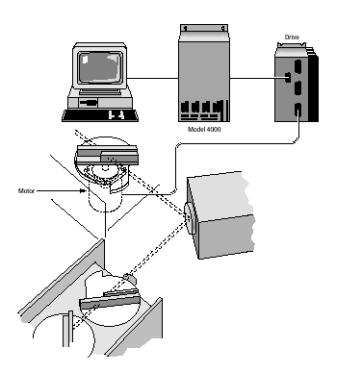
Aplicação #2
Esta segunda aplicação tem por objetivo mostrar o
uso dos motores de passo, acoplado a engrenagens, na movimentação de
telescópios. Comparadas às aplicações que utilizam apenas micromotores, as
engrenagens apresentam baixa eficiência, desgaste e podem ser barulhentas.
As engrenagens são justamente úteis, para romper
grandes inércias, pois a inércia refletida de volta para o motor através das
engrenagens é dividida pelo quadrado da inércia aplicada a elas. Desta maneira,
grandes cargas inerciais podem ser movimentadas enquanto o rotor mantem uma
carga menor.
No caso descrito era necessário vasculhar fenômenos
celestiais em velocidade baixa de 15º por hora e em velocidade alta em 15º por
segundo.
Assim, utilizando uma caixa de engrenagens que
reduz de 30:1, 30 revoluções dadas pelo motor equivalem a uma rotação de 360º
dada pelo telescópio, foi desenvolvido o projeto.
A velocidade de tracking de 15º por hora
corresponde 1.25 revoluções por hora, ou em torno de 9 passos por segundo para
uma resolução de 25000 passos por revolução. A velocidade de 15º por segundo
requere 1.25 rps para o mesmo motor. A lei do inverso do quadrado faz com que o
motor sofra uma carga de 1/900 da inércia rotacional do telescópio. Na figura
abaixo mostra o esquema do projeto.
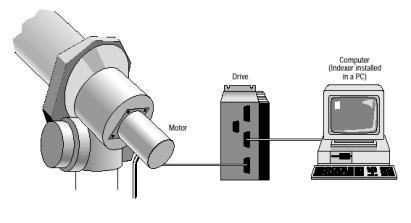
Aplicação #3
Veremos agora a aplicação do motor para rotacionar discos flexíveis antigos para finalizar. Estes discos possuíam uma alta velocidade de rotação, (em torno de 300rpm), alimentação de +12V, um passo de 1,8º ou 3,6º, e imã permanente. Utilizando uma lógica TTL que além comandar a alimentação das bobinas do motor na ordem certa para a correta utilização do mesmo, a lógica também controlava os processos de leitura e escrita. Tais discos continham também o bloco amplificador, se caracterizando como um circuito completo de manuseio do motor. Abaixo mostramos uma figura com os conectores de um antigo disco flexível Tandon TM100, de 51/4’. Para se acionar o motor do driver é preciso produzir os passo no pino 20, indicar a direção no pino 18 e ligar os pinos terras do circuito controlador com o do driver, através de qualquer pino ímpar.
7. CONTROLADORES PARA MOTOR DE
PASSO
Nesta etapa falaremos um pouco sobre circuitos que podem controlar os motores adequadamente. Destacamos que como as cores dos fios que levam energia as bobinas não são padronizados. Portanto não comentaremos sobre a ordem certa de polarização utilizando as cores dos fios.
Na
primeira etapa, falaremos sobre o controle de um motor de passo diretamente
pelo computador. Através da porta paralela visaremos controlar um motor de
quatro fases e unipolar através da excitação por passo-inteiro. Pesquisando os
drivers existentes, descobrimos o CI ULN2003 que é um 7bit 50V 500mA TTL-input
NPN darlington driver, que funciona
como amplificador. Obviamente toda a lógica deve ser exercida pelo computador
inclusive a da ordem de excitação das bobinas. Abaixo segue o circuito elétrico
mostrando a ligação entre o motor e a porta.
Destaca-se que o diodo zener foi utilizado como intuito de absorver o campo eletromagnético reverso produzido pelo motor quando o mesmo é desligado. A inversão observada nos pinos de entrada 3 e 4 do ULN2003 são necessárias para manter a ordem certa de ativação das bobinas.
Agora
veremos o controle ser feito através de componentes discretos. Utilizando um
contador Johnson CMOS que controla a etapa de potência não mostrada, podemos
exercer um simples comando ao motor somente através dos clock. Este circuito
tem a desvantagem de não exercer o controle da direção e observa-se que o mesmo
executa o procedimento de passo inteiro. Abaixo segue o esquema elétrico.
Utilizando
agora portas lógicas e flip-flops, exerceremos o controle tanto da direção
(através de DIR) quanto da velocidade do motor. Abaixo segue o esquema a ser
analisado.
O
circuito funciona basicamente invertendo a saída Q e Qinv de um dos flip-flops
em cada borda de descida. Na borda seguinte, podemos esperar que a saída do
outro flip-flop seja invertida mantendo a do primeiro igual, repetindo o ciclo
a partir de então. A porta XOR superior esquerda funciona como uma inversora, o
que permite só um dos flip-flops alterar o seu estado de acordo com as saídas.
Abaixo segue a tabela que se espera encontrar para este circuito, trabalhando
por conseqüência em passo inteiro.
Para DIR low Para DIR high
(sentido anti-horário) (sentido horário)
|
1A 2A 3A 4A |
|
1A 2A 3A
4A |
|
1 0 0 1 |
|
0 1 1 0 |
|
0 1 0 1 |
|
0 1 0 1 |
|
0 1 1 0 |
|
1 0 0 1 |
|
1 0 1 0 |
|
1 0 1 0 |
Por
último veremos um circuito com todas as etapas do processo. Abaixo segue o
circuito a ser analisado.
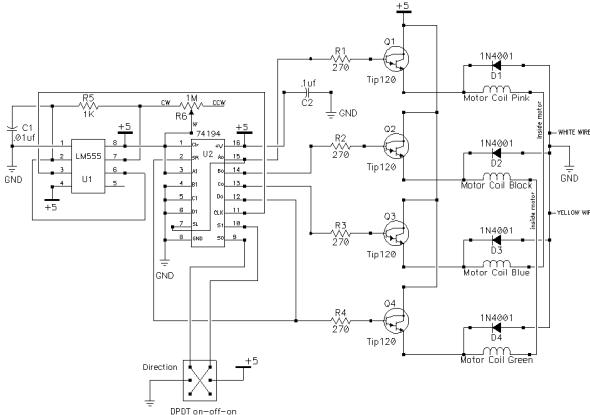
À esquerda vemos o LM555 que é responsável pela produção dos pulsos necessários para o CI 74194. Através do potenciômetro R6, podemos controlar o sentido da rotação. Através do resistor R5 e do capacitor C1 podemos controlar o ton e o toff do trem de pulsos, controlando então a velocidade. O CI74194 é um TTL registrador de deslocamento bidirecional acionado pelo clock do LM555. Os pinos S0 e S1 são os responsáveis por determinar se o deslocamento é direito ou esquerdo, ativando as saídas de A0 a D0. SR (serial right) e SL (serial left) são os pinos responsáveis pelo o bit high, inicialmente ativado por A1 estar high, efetuarem um deslocamento em anel. Assim, deve-se constatar somente um bobina do motor ser ativada por vez, após a etapa amplificadora constituída pelos transistores de potência TIP120. Como explicado anteriormente, os diodos são utilizados para proteger o circuito de tensões inversas provocadas pelo armazenamento de energia dos indutores. No caso específico, podemos verificar que a alimentação do motor é idêntica a alimentação da parte lógica.
8. VANTAGENS E DESVANTAGENS
Em relação aos primeiros motores o motor de passos apresenta
evidentes vantagens, como tamanho e custo reduzidos, total adaptação a lógica
digital (o que permite o controle preciso da velocidade direção e distância),
características de bloqueio , pouco desgaste e dispensa realimentação.
São poucas as desvantagens mais elas existem: má relação
potência - volume e principalmente controle relativamente complexo
9. REFERÊNCIAS BIBLIOGRAFIA E
SITES
-
Lobosco, Orlando Silvio & Dias, José Luiz P. da Costa; Seleção e
Aplicação de motores Elétricos; Makron Books
- Gajski,
Daniel D.; Principles of Digital Designer; Prentice-Hall; 1997
-
Taub, Herbert; Circuitos Digitais e
Microprocessadores; McGraw-Hill; 1984
http://www.doc.ic.ac.uk/~ih/doc/stepper/
http://www.eng.morgan.edu/~malone/dskdrv/dskdrv.html
http://www.ohmslaw.com/robot.htm
http://www.eaglehawksc.vic.edu.au/kla/technology/stepmotr/intro.htm
http://www.hut.fi/Misc/Electronics/circuits/diskstepper.html
http://www.ee.washington.edu/circuit_archive/text/ddmotor.html
http://www.eece.ksu.edu/~starret/581/topic.F95/schartz.html
http://laguna.fmedic.unam.mx/~daniel/handy_board/handy_bipolar.html
http://www.robotics.com/motors.html
http://members.tripod.com/~schematics/stepper.gif
{kind=link}
http://www.eio.com/stepindx.htm